In a world increasingly reliant on machines for everything from aiding mobility to exploring hazardous environments, Stanford University engineers have made a leap that could drastically cut our energy footprint.
They’ve unveiled a novel electric motor actuator, ingeniously incorporating springs and clutches, that promises an up to 97% improvement in energy efficiency during dynamic tasks.
This innovation could redefine the capabilities of robotics and assistive devices, opening a new chapter in sustainable technology.
The challenge was clear: modern machines, from prosthetics to autonomous robots, are asked to perform tasks that demand complex, dynamic movements. However, the conventional electric motor—designed for constant, unvarying tasks—falls short in energy efficiency when faced with such demands. Enter the team from Stanford, who devised a spring-assisted actuator capable of executing these dynamic tasks with a mere fraction of the energy traditionally required.
How It Works: A Symphony of Springs and Clutches
The secret to this actuator’s success lies in its unique combination of springs and electroadhesive clutches. Springs, by their nature, store energy when stretched and release it when they return to their original length. The actuator utilizes this principle by engaging springs to share the load during heavy lifting, thus conserving energy. The clutches then lock the springs in this energy-storing state until needed for another task.
Steve Collins, an associate professor of mechanical engineering at Stanford and the senior author of the study, highlights the actuator’s advantage: “Rather than wasting lots of electricity to just sit there humming away and generating heat, our actuator uses these clutches to achieve the very high levels of efficiency that we see from electric motors in continuous processes, without giving up on controllability and other features that make electric motors attractive.”
The Technology Behind the Innovation
Electroadhesive clutches play a pivotal role. These clutches, sandwiching each rubber spring, allow for rapid engagement and disengagement through the application of voltage. This mechanism facilitates a seamless transfer of stored energy to assist the motor, all the while maintaining a lightweight and compact design.
Erez Krimsky, the paper’s lead author, explains the potential: “They’re lightweight, they’re small, they’re really energy efficient, and they can be turned on and off rapidly… And if you have lots of clutched springs, it opens up all these exciting possibilities for how you can configure and control them to achieve interesting outcomes.”
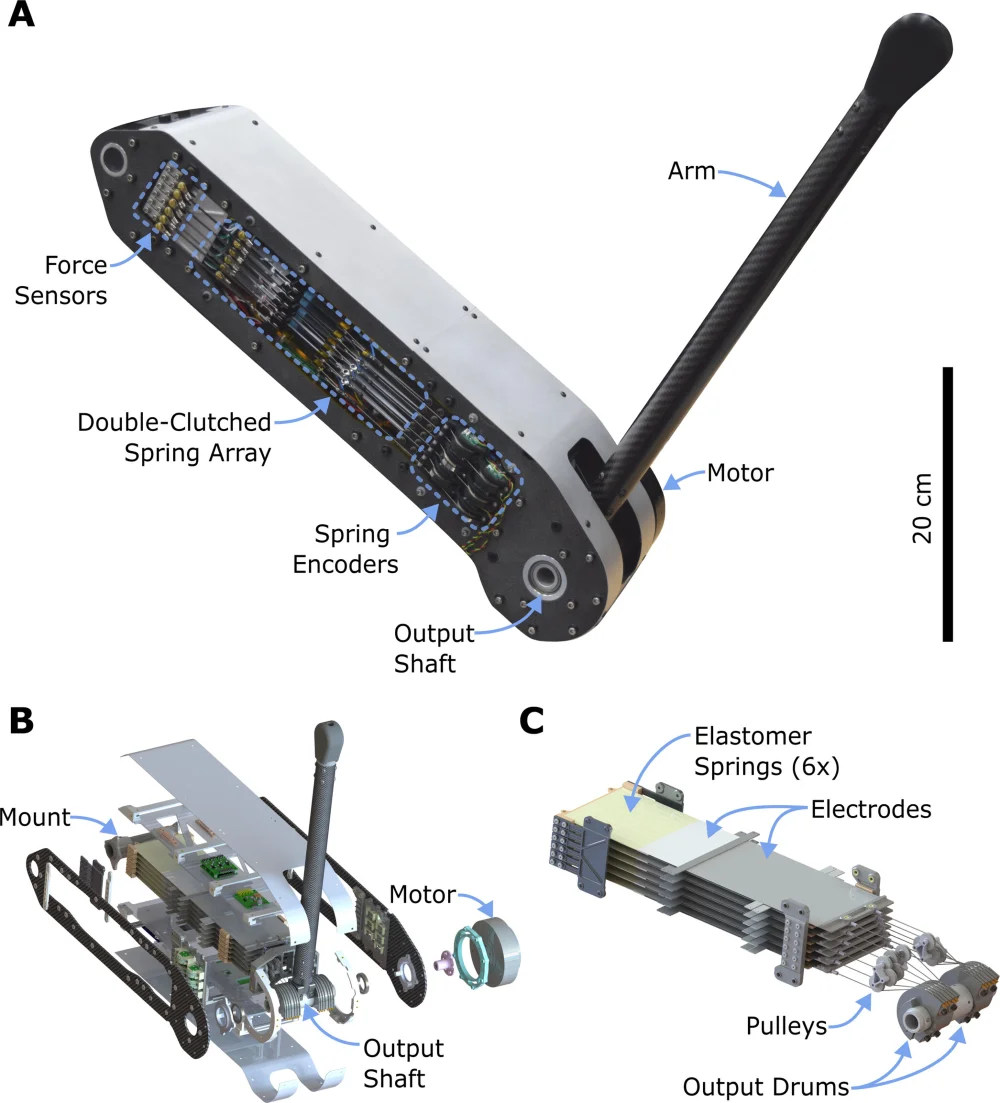
(A) Photograph of the hardware prototype with six doubly clutched springs. Spring force was measured by strain gauges on the spring mounting plate. Spring displacement was measured by encoders connected to the spring-electrode tensioners. A geared (6:1) brushless DC motor is connected directly to the output shaft. (B) Exploded-view rendering showing the actuator frame, output shaft assembly, actuated arm, internal electronics, and other assembly components. (C) Rendering of the doubly clutched elastomer spring array. Cables connected to the output clutches are routed over redirection pulleys onto drums on the output shaft to produce joint torque.
Beyond the Lab: Implications for the Real World
The implications of this technology extend far beyond the laboratory. With a 50% to 97% reduction in power consumption across various tasks, this actuator could revolutionize the operational efficiency of robots and assistive devices. Robots could operate longer and venture further, while assistive devices like prosthetics could offer unprecedented autonomy to users without the frequent need for recharging.
The team is already looking ahead, planning to refine the actuator’s responsiveness and integrate artificial intelligence to enhance its adaptability to new tasks. With commercialization in sight, Collins and Krimsky are optimistic about the actuator’s role in powering the robots and assistive devices of the future.
As the world grapples with the dual challenges of technological advancement and sustainability, innovations like the spring-assisted actuator from Stanford stand out as beacons of hope. They not only promise to enhance the capabilities of machines, but also to do so in a manner that respects our planet’s finite resources.
Reference to this groundbreaking work can be found in the March 20 issue of Science Robotics, a testament to the potential of this invention to reshape our approach to robotics and energy consumption.
Funded by the National Science Foundation, this project is yet another example of how targeted research can lead to innovations that offer tangible benefits to both humanity and the environment.